
As this summer I’m planing to organize some drone racing with my friends, I started to look for cheap racing quadcopters. I do not want to lend them my precious Walkera racing quads; if it crashes, at least it is done by my hand. Among the wide variety of racing drones, I found this REDCON Phoenix 210 ARF (almost ready to fly) kit. Firstly, it is pretty cheap, so it’s perfectly suitable for newbies, as most of my friends are. Secondly, it is available in 5 different colors so it would be more easy to distinguish which quad is yours.
In my opinion, newbies should always practice with cheap models like this REDCON Phoenix 210, not versatile and expensive ones like the Walkera Runner 250 Advanced. Learning always costs, but it depends on you how much :)
The difference between an RTF (ready-to-fly) and an ARF package is that the second needs some additional “need to complete” parts before you can start flying. Usually, this can be the battery, transmitter or both, like in the case of this Phoenix 210. This is not necessarily a disadvantage because you can use it with any of your transmitters that you already own and you are already familiar with. For example, when I ordered mine, I knew it that I would pair it with my Flysky FS-i6A transmitter.
After I accepted the REDCON Phoenix 210 for review, I found out on the RcGroups forum that I have to make some modifications to it. Frankly, I didn’t like the idea that a brand-new product requires soldering and other hacks to be able to fly it.
BTW, this racing quad is advertised as available in two variants, with CC3D or Naze3 flight controller.
REDCON Phoenix 210 quadcopter review
I received this Phoenix 210 quad and the Walkera F210, which I reviewed last week. I must give thanks to Elliot from Gearbest for offering these two racers. We had a good collaboration over the last year, which ends now. I will not say “unfortunately” because he was promoted, so good luck Elliot with your new job!
I should point out that my reviews reflect exclusively my personal thoughts about the products and that I do not accept being influenced in any specific way by the sponsors.
REDCON Phoenix 210 review – First impressions
The Redcon’s box is surprisingly small for a fully assembled quadcopter. As I previously mentioned, the transmitter, receiver, and battery are not included. Besides the quad, I found inside the box only a few accessories (receiver wires, 1 set of propellers, and a 5.8G rubber duck antenna). The manufacturer must be very stingy because he didn’t include a 1$ battery Velcro strap or a set of spare propellers.
If you are new to this domain, you will be scared by the initial setup because there is no instruction guide included in the box.
At first impression, everything looked good, and I didn’t have the impression of a cheap product. The carbon fiber air-frame looks pretty solid, between the upper and lower frame, there is a 3D printed plastic separator. Unfortunately, the motor protectors, which are also the landing gears, are made of plastic.
REDCON Phoenix 210 main parts
- 210 mm 3K carbon fiber frame;
- 4 pieces of AntiGravity Gen2 2204 / 2300kv motors;
- CC3D flight controller (FC);
- Power distribution board (PDB)
- 4 pieces of ESC Redcon 15A (Electronic Speed Control);
- 5.8G FPV transmitter (TS5823 – 200 mW);
- 800 TVL camera;
- Buzzer & status LED bar.
In the rear part of the quad, there is a nice status LED bar, which is mainly useless if you’re not trying to configure it through the CleanFlight APP.
Above the frontal 800 TVL camera, there is a camera mounting plate that allowed me to install my RunCam 2 camera to record the journey of my flights (at least I hoped so).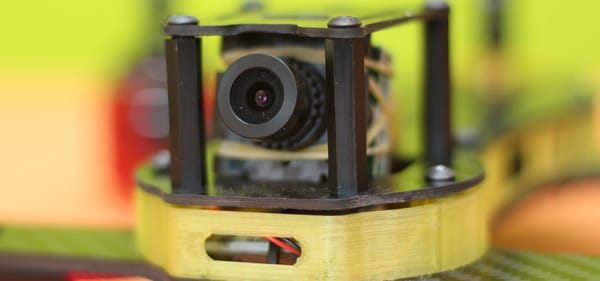
REDCON Phoenix 210 review – Initial setup
Almost every square cm inside the frame is used without room for my FlySky FS-IA6 receiver. I also had difficulty installing on the top of the aircraft a 2200 mAh battery, which proved to be too long so I had to order a smaller 3S 1500 mAh one (7.2 x 3.7 x 2.8 cm).
According to the seller’s specs, the REDCON Phoenix 210 can be powered by 3s or by 4s Li-POs. This is good because higher voltage will allow more throttle punch. Being afraid to see smoke, I tested it only for a short time with a 4s Li-Po and the good news, it survived :)
The problems started after I connected my 6CH receiver to the CCD3 flight controller with the included servo cable, and I powered it ON. I have tried in every way to arm the motors but without any success. I had to go back to “uncle “Google to search what can be the problem, and I found out that FC is set by default to permanently disarmed as a safety measure.
Using the LibrePilot GCS (OpenPilot) APP, after I ran the initial configuration wizards (both airplane and transmitter), I managed to arm the motors. Being an enthusiast I finally succeeded in bringing out some noise from this quad, I pushed the throttle stick up, the quad lifted off the ground about 10 cm, and then made a heart attack tumbling. I broke one propeller (that I successfully glued it back) and the FPV antenna. After a few more tries I realized that there is something wrong with the setup. I went back to the RC Groups forum, where I found out that the flight controller is stupidly orientated CW 90 degrees by default. I quickly checked the arrow on the CC3D, and it was orientated to the right instead of ahead.
Luckily, LibrePilot allows to set the orientation of the FC. I had two options: to set the YAW to -90°, where the pitch was good but the roll reversed, or set the YAW to +90° where the roll was OK but the pitch is reversed. At this point, I reached the limit of despair, but I got a good tip from Seby that I can reverse one channel on the transmitter, which solved the problem.
Indeed, it was much harder to get this damn quad 1 meter above the ground than build entirely my F450 Quadcopter almost from scratch. Usually, it is fun building or mod my toys, but this time, it was full of frustration because nothing seemed to have success…
REDCON Phoenix 210 review – Testing
The next day, after finally setting up my Phoenix 210, I went out for some test flights. Initially, everything seemed OK except the wobbling but after a few circles, the quad started to behave crazily and crashed. There were no major damages except that two motors sounded strange, I should probably replace the bearings. Hopefully, the wobbling can be removed with some PID tuning. Being extremely sensitive to my controls, I wonder whether this quad is not set by default to “Acro” mode.
After I manage to fix the above issues (adjust the optimal PID and replace the bearings) I will update my review with the flight performances of this REDCON Phoenix 210 racing drone.
Pricing and availability
After all the above, if you are still interested in trying it, you can find it on GearBest and other online retailers. You can choose between red, yellow, and pink colors. For the battery, I recommend looking out for a small-sized, 1300-1600 mAh 3-cell one.
Hi,
This is Amanda, we are specializing in brushless motors, ESCs and some of other quad-copter spare parts.
We launch a new 2205 motor with the strong performance which would be suitable for your REDCON Phoenix 210 racer. It have beat some well-know brand, it’s more better for racing.
Main specs: 18pcs cooling and 2.0mm magnet, Configu ration: 12N14P, 3s-5S Li-Po, Rotor: N52H arc magnets, 2300KV = 1 x 0.45mm 11 turns Delta DLRK, Bearings: Japanese NSK, Base casing: Al 7075
Bell cap: Al 7075, Weight: 27.8G