

A few weeks ago, I’ve already introduced this Runner 250 Advance on my website. Ever since it was announced, it seemed like an exciting model. Adding GPS system to a racing quadcopter was an interesting movement from Walkera, although some pilots considered this an unnecessary one.
The previous “Runner 250” model proved to be a very popular racer. In my opinion, Walkera, through the GPS upgrade, will strengthen its position in this market segment.
I’ve always considered that racing quadcopters are recommended only for advanced pilots. Without flight experience, newbies can quickly destroy their racer, which is not cheap at all.
After testing a lot of small multi-rotors last year and moving to a GPS model built especially for aerial filming, it is time now for my first racing quadcopter. It gave me some trouble trying to find the best model. Finally, I chose the Runner 250(R) as it is the only GPS-assisted racing quadcopter.

- BNF package without the transmitter (in carton box);
- Basic package with 800TVL camera and Devo7 transmitter;
- Aerial package with HD camera and Devo7 transmitter;
- Full FPV package with 800TVL or HD camera and DevoF12E transmitter;
- Walkera Runner 250(C) Advance with CC3D flight controller;
- Runner 250 Advance deluxe pack with HD camera, DevoF12E remote controller, and FPV goggles.
All the above-mentioned packages can be purchased in two different variants depending on the FPV 5.8GHz TX module:
- TX5817 (CE) with 25mW power and around 150-meter range;
- TX5816 (FCC) with 200mW power and around 300-meter transmission range.
Runner 250 Advance review and test
I was very glad when Maggie from HobbyWOW offered me to test this racer, so I accepted it without any hesitation (she helped me to avoid spending more money on this hobby :).
They sent the Runner 250 Advance from their EU warehouse, this way I received it faster and there were no additional charges like VAT or customs fees.
Because of the fact that she forgot to write my phone number on the forwarder’s AWB, it took almost one week more to get the package and start testing my first racing quadcopter.
Inside the backpack, everything was well secured as each part had its own place. Besides the carbon fiber airframe (with preinstalled FC, RX, ESC, OSD module, FPV TX, camera, and brushless motors) and the Devo 7 transmitter, I found the following:
- 2s and 3s balance battery charger with 15v power adapter;
- 3s 11.1V 2200mAh 25C Li-Po battery;
- Anti-slipping band for the battery;
- A small bag with installation tools;
- 2 pieces of CW and 2 pieces of CCW 6″ propellers;
- micro USB data cable (for firmware upgrade);
- Training cable for Walkera WK-2801-Pro and Devention transmitters;
- Devention instruction manuals (on DVD);
- Runner 250 Advance user manual.
With only 2 Kg total weight (including the backpack), the Runner 250 Advance is really easy to carry with you everywhere. This is a huge advantage especially if the flight zone is km’s away from the place you parked your car and it’s making it much easier to organize some cool races near isolated forests.
At first glance, the Runner 250 Advance looks like a machine from the “Transformers” movie. Because of the radio antennas that look almost like two tentacles, it can also be confused with a bloody alien species :)
Runner 250 Advance review – Main parts
- Carbon fiber frame;
- White front LEDs;
- Red rear status LEDs;
- Direction LEDs;
- Powerboard;
- 15A brushless ESC (2-CW and 2-CCW);
- WK-WS-28-014 brushless motors;
- FCS-Runner 250(R) 8bit flight controller (MultiWii);
- Devo-RX710(R) Receiver;
- TX5816 or TX58417 5.8GHz real-time image transmitter;
- Runner 250 OSD (R) telemetry module
With the improved design of this “Advance” model, Walkera seems to have solved the problem of the destroyed front lights during crash lands of the previous model. I find it strange that during this “face-lifting,” they didn’t solve the protection of the front camera too, especially because the replacement of this camera costs 6 times more than the replacement of an LED.
The GPS antenna comes in a small carton box and must be mounted and secured with 3 screws on the rear part of the quadcopter. The installation process is very simple and takes about 5 minutes, just take care of the right orientation of the GPS plug when you are inserting it in the flight controller.
On the top of the airframe, there is a camera mount with anti-vibration dumpers which allows installing small cameras like the RunCam HD. This is pretty cool if you want to capture your race.
The flight direction changes are signaled by some orange LED bars which are located on the side of each arm.
There are two status LEDs in the rear of the quadcopter which are not synchronized and show different things. The left one indicates the GPS status, for example, 2 blinks mean that 7 satellites were found and the quadcopter is ready for safe GPS assisted flight.
Runner 250 Advance review – Transmitter (Devo7)
My Runner 250(R) comes with the Devo 7, which is a nice entry-level transmitter from Walkera. It feels good in the hand but is heavier than I expected, especially after I loaded 8 pieces of AA Ni-Cd batteries. I found it more convenient to feed the transmitter with a single Li-Po battery, and I have already ordered an 11.1V 2200mAh 15C battery for this purpose.
Being a “universal” transmitter suitable for all kinds of aircraft, some settings have to be done before binding it with the quadcopter. In the Runner 250 Advance’s user manual there are precisely all the configuration steps for the Devo 7, F7, and F12E transmitters.
Besides the usual control buttons and sticks, the Devo 7 transmitter has five switches and one rotary potentiometer:
- “Hold turn” not set with the Runner 250(R);
- “Gear” allows to stop/start recording with the HD camera;
- “Mix” allows to switch between “Manual”, “GPS” and “Return to home” modes;
- “FMOD/FMD” allows to switch between “Normal “, “Intermediate” and “Roll/Aerobatic” flight modes;
- “D/R” Ellev/Aile/Rudd;
- Aux2 can be used to control the angle of a gimbal.
Runner 250 Advance review – Flight capabilities
For a safe and successful maiden flight, it is very important to perform all the possible calibrations (compass, gyro, and accelerometer).
In Mode2, the motors can be unlocked and locked with the left control stick (Throttle/Rudder) by pushing it to down left respectively down right.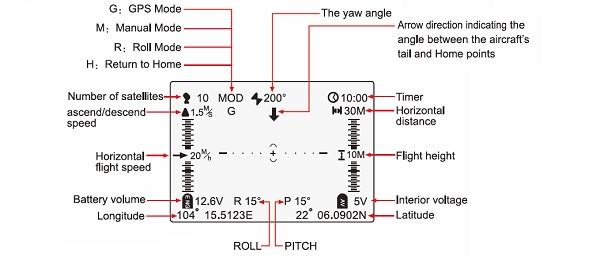

As shown in the image above, thanks to the OSD module, there is much useful flight information displayed on the FPV monitor.
Unfortunately, I succeeded in testing it only indoors and on short flights as it is very noisy because of the very powerful brushless motors. Moreover, I’m still searching for my son’s LEGO pieces that were spread all over my living room by the powerful wind that the 6″ propellers generated. I promise that as soon as the weather allows me I’ll make some test flights in nature and post them here. I’m very curious and anxious to experience the speed this quadcopter can reach and check how it reacts to my control maneuvers. Meanwhile, I will try to upload the latest firmware (V1.2).
HobbyWOW offered this product for an honest review; thanks again for their professional attitude. For those who are interested in buying it, the upcoming Black Friday will be listed with an additional 8% discount.
Runner 250 Advance – Unboxing and quick test video


{kind=link}

A newer upgraded model was just announced!
The Runner 250 PRO offers approximately the same features but it has a much nice design.
Are you planning to review this model too?
I just got my Runner 250 in today. The manual says it is Version 1.3 like yours but on the website, I see that the latest firmware is V1.2.
Does anyone have any info on this?
Thanks
after the firmware upgrade it still has the “flip of death” issue?
Which LIPO do you command for the transmitter?
Thanks for the nice review!
Did you tried the latest firmware? It is more stable?